18
5.
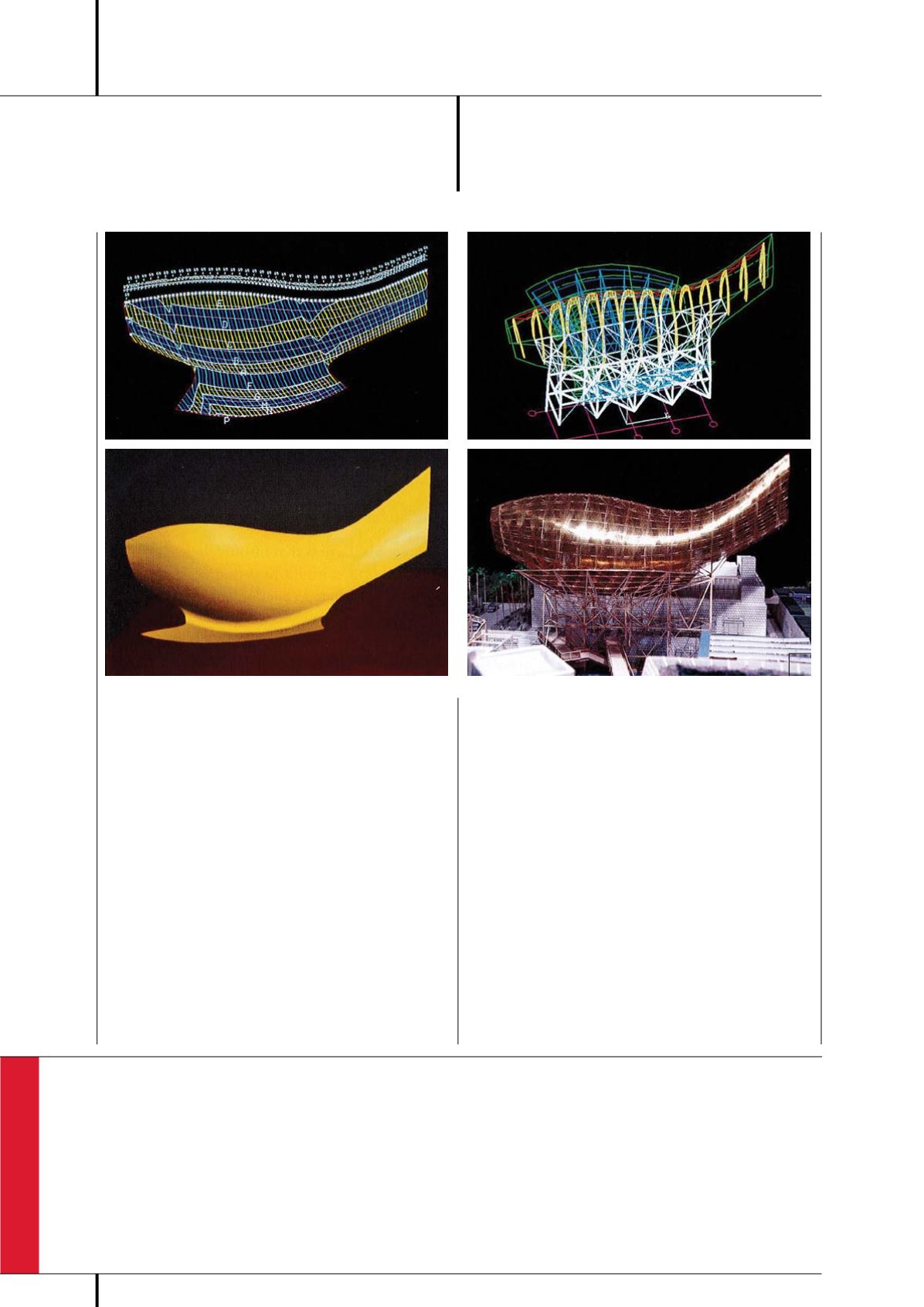
Zastosowanie programu CATIA
V3 do opracowania geometrycz-
nego rzeźby Złota Ryba (projekt:
Frank Gehry, model 3D: Rick Smith,
źródło: Gehry Partners, 1992).
skrócenia czasu wykonywania zadań. Okazało się to niezwykle
istotne dla dalszego rozwoju cyfrowych narzędzi parametrycz-
nych w XXI wieku.
Lata 90. ubiegłego stulecia to dynamiczny okres postępu
kultury komputerowej oraz szybkiego wzrostu mocy obli-
czeniowej sprzętu, a co za tym idzie – rozwoju grafiki 3D.
Teoria mnogości dostarczyła bowiem matematyce języka
formalnego do stworzenia precyzyjnych podstaw topolo-
gii, czyniąc z niej istotę syntetycznych przestrzeni w grafice
komputerowej. Wykorzystała to firma Dassault Systèmes,
zajmująca się oprogramowaniem wspomagającym projekto-
wanie, i w 1993 roku wprowadziła do nowej wersji programu
CATIA V4 wiele elementów języka parametrycznego, współ-
pracujących z Pro/ENGINEER 6 . W tym samym czasie biuro
Gehry Partners zatrudniało już Ricka Smitha z Lotniczego Biura
Konstrukcyjnego, eksperta od programu CATIA. Pokonywał
on wyzwania geometryczne związane z projektem i realizacją
obiektu Złota Ryba w Barcelonie (1992) (rys. 5), a następnie
Muzeum Guggenheima w Bilbao (1993–1997).
Pro/ENGINEER mogli integrować ze sobą poszczególne
elementy – już nie dwuwymiarowe, lecz trójwymiarowe – za
pomocą równań parametrycznych 5 . Oznaczało to przejście
projektowania w trzeci wymiar, a syntetyczna przestrzeń stała
się rzeczywistością wirtualną i medium projektowym. Dzięki
asocjatywności geometrii zmiany dokonywane na jednym
z rysunków 3D były automatycznie nanoszone na pozostałe,
sporządzane przez wielu użytkowników. Narzędzie to przez
swoją elastyczność, miało zachęcać architektów do tworzenia
bardziej zróżnicowanych obiektów przy zerowych kosztach
modyfikacji. Ponadto, Geisberg sprawił, że modelowanie
parametryczne stało się eksploracją rozmaitych kształtów
geometrycznych. Wprowadzono bowiem możliwość mani-
pulacji parametrami oraz modelem 3D poprzez zmiany
relacji bazowych. Wpływ na rozszerzanie funkcji programu
miał miniaturowy napęd (B-rep), który pozwalał na obracanie
i przekształcanie obiektów 3D o spójnej geometrii i topologii.
Do sprawnego działania sprzętu potrzebowano jednak coraz
większych zasobów pamięci operacyjnej i podręcznej oraz
praktyka projektowa
architektura parametryczna
warsztat architekta
5


