116
Środki transportu wewnętrznego
odbywa się w rynnie lub rurze nieprzerwanie wykonującej krótkie
ślizgi lub skoki, powodujące posuwanie się materiałów w wyznaczo-
nym kierunku.
Do przenośników bezcięgnowych zaliczane są
przenośniki miotające
,
których idea funkcjonowania polega na nadaniu przemieszczanemu
materiałowi sypkiemu odpowiedniej energii kinetycznej, w efekcie
czego zostaje on wyrzucony na założoną z góry odległość – nawet do
30 m. W zależności od rodzaju organu roboczego wyróżnia się trzy
odmiany przenośników miotających: taśmowe (z taśmą prostą bądź
łukową), bębnowe oraz talerzowe.
x x x
Przenośniki z medium pośredniczącym
Przenośniki pneumatyczne
stosowane są do transportu ładunków, któ-
rym możliwe jest nadanie potrzebnej prędkości za pomocą strumienia
(na ogół powietrza). W zależności od zasady działania dzielą się na: ciś-
nieniowe (ssące, tłoczące i ssąco-tłoczące), fluidyzacyjne i grawitacyjne.
Przenośniki hydrauliczne
służą do przemieszczania ładunków w otwar-
tych korytach lub zamkniętych przewodach w wyniku oddziaływania
strumienia cieczy (najczęściej wody), które nie ulegają uszkodzeniu pod
jej wpływem.
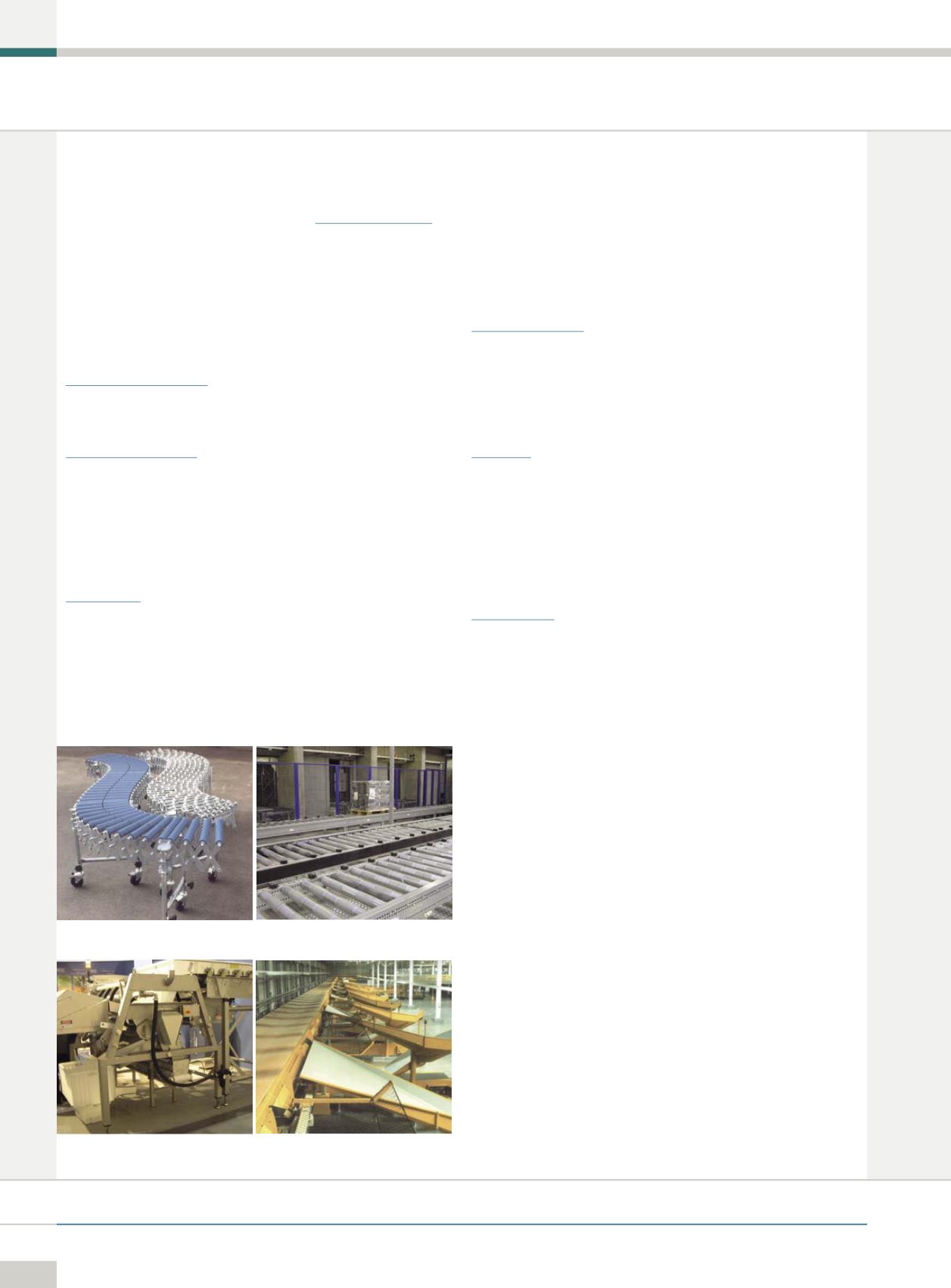
Istnieją przenośniki hybrydowe, czyli urządzenia stanowiące jeden ciąg
transportowy utworzony z różnych rodzajów przenośników (fot. 32).
x x x
Manipulatory i roboty przemysłowe
Manipulatory
to urządzenia przeznaczone do wspomagania bądź
zastępowania (częściowego lub całkowitego) człowieka przy wyko-
nywaniu czynności manipulacyjnych w przemysłowym procesie pro-
dukcyjnym, sterowane ręcznie lub automatycznie za pomocą sta-
łoprogramowego, własnego lub zewnętrznego układu sterującego.
Służą do zdalnego manewrowania (podawania, przesuwania, przy-
trzymywania, obracania itp.) określonymi przedmiotami podczas
realizowania czynności transportowych. Ze względu na rodzaj
napędu rozróżnia się manipulatory: ręczne, napędzane, serwomani-
pulatory, telemanipulatory i automatyczne, zaś pod kątem budowy:
monolityczne, modułowe stacjonarne bądź mobilne, a wśród nich:
podłogowe, konsolowe, portalowe, suwnicowe i bramowe. Biorąc pod
uwagę ruchy ramion roboczych, wyróżnia się manipulatory: kartezjań-
skie, cylindryczne, sferyczne, antropomorficzne (przegubowe) oraz
typu scara. Natomiast, jeżeli chodzi o wartość przenoszonego obciąże-
nia dzielimy je na: bardzo lekkie (do 1 kg), lekkie (>1–10 kg), średnie
(>10–200 kg), ciężkie (>200–1000 kg), bardzo ciężkie (>1000 kg).
Roboty przemysłowe
to automatycznie działające urządzenia przezna-
czone do wykonywania czynności manipulacyjnych w przemysłowych
procesach produkcyjnych, z układem ruchu składającym się z co
najmniej trzech zespołów ruchu i własnego przeprogramowywalnego
układu sterującego. Klasyfikuje się je tak samo jak manipulatory.
x x x
Paletyzatory i depaletyzatory
Paletyzator
to urządzenie przeznaczone do układania opakowań trans-
portowych na palecie podczas formowania jednostki ładunkowej, na
ogół przy wykorzystaniu robotów. Rozróżnia się urządzenia:
• jednostanowiskowe, wyposażone w system doprowadzający oraz
układający stosy, skonstruowany w taki sposób, że w tym samym czasie
może być formowana tylko jedna paletowa jednostka ładunkowa,
• wielostanowiskowe, z systemem doprowadzającym i układającym
w stosy, tak skonstruowane, że w tym samym czasie można formować
kilka jednostek ładunkowych.
Depaletyzatory
to jedno- lub wielostanowiskowe urządzenia,
w których robot przemysłowy dokonuje rozformowania jednej lub
wielu jednostek.
W praktyce można również spotkać urządzenia, które pełnią zamiennie
funkcję paletyzatora i depaletyzatora.
x x x
Specjalizowane środki transportu technologicznego
Do tej grupy zalicza się środki transportu technologicznego, które dosto-
sowane są do specyficznych właściwości przemieszczanych ładunków.
Podsumowując, można stwierdzić, że istnieje bardzo duża różnorod-
ność środków transportu wewnętrznego i w niniejszym artykule
przedstawiono ich skrótową charakterystykę. Pewne jest jednak to,
że rynek oferuje taką liczbę urządzeń, że zaspokoją one rozliczne
potrzeby konsumentów.
Literatura
1. Ł. Wojciechowski, A. Wojciechowski, T. Kosmatka, „Infrastruktura
magazynowa i transportowa”, Wyższa Szkoła Logistyki, Poznań 2009.
2. Z. Korzeń, „Logistyczne systemy transportu bliskiego i magazyno-
wania. Tom I: Infrastruktura, technika, informacja”, Biblioteka Logi-
styka, Poznań 1998.
3. Z. Korzeń, „Logistyczne systemy transportu bliskiego i magazyno-
wania. Tom II: Projektowanie, modelowanie, zarządzanie”, Biblioteka
Logistyka, Poznań 1999.
4. M. Goździecki, H. Świątkiewicz, „Przenośniki”, WNT, Warszawa 1979.
5. „Mały poradnik mechanika, Tom II: Podstawy konstrukcji maszyn
i maszynoznawstwo”, pod red. Z. Bieńkowskiego, wyd. XVIII, WNT,
Warszawa 1994.
6. Navigation Overview, NDC News, nr 11, s. 14–15.
7. J. Hugh, „Integration and automation of manufacturing systems”
(e-book), copyright 1993–2001,
.
Fot. 29. Przenośniki nienapędzane
Fot. 30. Napędzane przenośniki wałowe
fot. A. Wojciechowski
Fot. 31. Przenośnik wstrząsowy
fot. DHL
Fot. 32. Przenośnik hybrydowy
fot. A. Wojciechowski (2)


