Przetwornice częstotliwości w automatyce przemysłowej – budowa, dobór, zastosowanie
84
Przetwornice częstotliwości są dziś powszechnie wykorzystywane w napę-
dach silników indukcyjnych, zapewniając płynne sterowanie prędkości
wału silnika. Obecnie trudno sobie wyobrazić napęd z silnikiem asyn-
chronicznym klatkowym (SK) czy synchronicznym z magnesami stałymi
(PMSM) bez zastosowania przetwornicy częstotliwości (inaczej: falownika,
przemiennika częstotliwości czy inwertera). Silniki synchroniczne (np.
PMSM) z wyspecjalizowanymi przetwornicami częstotliwości (servo) są
aktualnie wykorzystywane w robotyce. Roboty przemysłowe charaktery-
zują się dużą dynamiką ruchu, precyzyjnie ustaloną liczbą obrotów wału
silnika, często z identyfikacją położenia kątowego wału silnika w stanie
spoczynku. Silniki PMSM wyposaża się standardowo w enkodery inkre-
mentalne lub absolutne w celu zapewnienia precyzyjnej regulacji pręd-
kości lub określenia położenia kątowego wału. Znane są już rozwiązania
napędów z silnikami synchronicznymi dużych mocy, niemniej jednak nie
są one jeszcze stosowane jako zamienniki silników asynchronicznych klat-
kowych, mimo dużej sprawności i braku poboru mocy biernej.
W artykule omówione są zaawansowane właściwości przemysłowych
przetwornic częstotliwości z dwupoziomowymi falownikami napięcio-
wymi o modulowanej szerokości impulsów wyjściowych napięć fazo-
wych (modulacja szerokościowa MSI), które są używane w napędach sil-
ników asynchronicznych klatkowych. Napędy z pojedynczymi silnikami
zasilanymi przetwornicami częstotliwości nie stwarzają zwykle trudności
przy ich wykorzystywaniu w typowych zastosowaniach przemysłowych.
Problematyczne są zagadnienia pochodne: pobieranie prądu niesinusoi-
dalnego z transformatora elektroenergetycznego, zaburzenia międzyfa-
zowe (VDM) i doziemne (VCM) za falownikiem, zasilanie silnika zanu-
rzonego w wodzie lub umieszczonego w strefie zagrożonej wybuchem,
współpraca przetwornicy częstotliwości z transformatorem o układzie
sieciowym IT, stosowanie ochrony uzupełniającej w postaci wyłącznika
różnicowoprądowego i inne. Omówione zostaną także właściwości prze-
twornic częstotliwości w aspekcie ich doboru do napędów wielosilni-
kowych, np. napędu sztywnego bębna kilkoma silnikami lub napędów
wielosilnikowych kilku bębnów połączonych elastycznym sprzęgłem.
x x x
Rodzaje napędowych przetwornic częstotliwości
Napięciowe przetwornice częstotliwości są podstawowym przekształ-
tnikiem energoelektronicznym stosowanym w zautomatyzowanych
napędach maszyn. Ich głównym zadaniem jest konwersja napięcia prze-
miennego przemysłowej sieci zasilania na trójfazowe napięcie przemienne
o częstotliwości i wartości skutecznej dopasowanej do potrzeb silnika.
W napędzie silnik musi w zadanym czasie uzyskać prędkość obrotową
i wytworzyć żądany moment napędowy, maksymalizując sprawność tego
procesu. Aby zwiększyć produktywność silnika i dynamikę, w napędo-
wych przetwornicach częstotliwości wykorzystuje się modele wektorowe
sterowania silników (VVC, FVC, DTC), które w czasie rzeczywistym
umożliwiają wymuszanie optymalnych, dla danego napędu, parametrów
napięcia zasilania. Stosowane w oprogramowaniu przetwornic częstotli-
wości modele sterowania silników muszą zapewniać szybkie wyznaczanie
wartości parametrów napięcia zasilania silnika na podstawie rzeczywi-
stych prądów fazowych i prędkości obrotowej wału. Prędkość obrotowa
silnika może być mierzona bezpośrednio, np. enkoderami (bezpośred-
nie sprzężenie prędkościowe), lub wyznaczana pośrednio estymatorami
prędkości (pośrednie sprzężenie prędkościowe). Prądy fazowe silników są
mierzone bezpośrednio na wyjściach mocy przetwornicy bezstykowymi
przetwornikami (np. hallotronami firmy LEM).
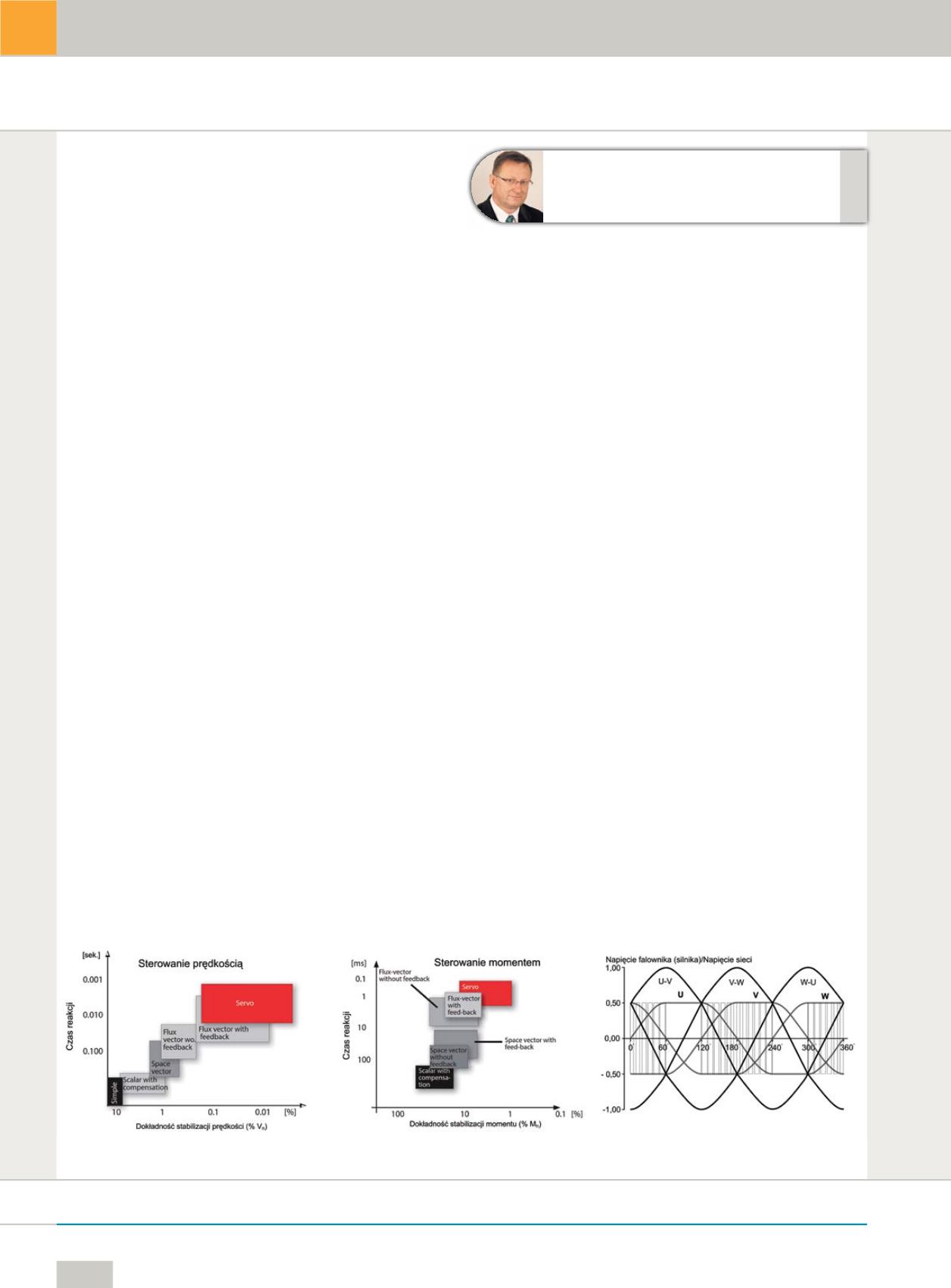
Sterowanie silników przetwornicami częstotliwości, wykorzystującymi
modele wektorowe z bezpośrednim pomiarem prędkości wału silnika,
umożliwia budowę napędów o dużej precyzji regulacji prędkości wału
napędowego. Dokładność stabilizowania prędkości wału silnika, przy
skokowej zmianie momentu obciążenia wału silnika asynchronicznego
klatkowego w zakresie (0–100%) M
n
, zależnie od wykorzystywanego
modelu silnika, przedstawia rys.1. Wynika z niego, że przetwornice czę-
stotliwości sterowane skalarnie, z kompensacją poślizgu, osiągają 1%
dokładności stabilizacji prędkości. Przetwornice skalarne są wykorzysty-
wane w napędach pomp, wentylatorów oraz napędów z silnikami star-
tującymi przy obciążeniu do 50%M
n
, w których nie występują skokowe
zmiany momentu obciążenia silnika lub przejściowe wahania prędkości
nie są istotne dla realizowanego procesu technologicznego.
Napędowe przetwornice częstotliwości nieustannie podlegają rozwojowi.
Z jednej strony pojawiają się sterowane elementy mocy, które pracują
dwustanowo przy coraz wyższych napięciach blokowania i przewodzo-
nych prądach (np. tranzystory HVIGBT), a z drugiej następuje ciągły
rozwój oprogramowania wykorzystującego coraz bardziej złożone algo-
rytmy sterowania specjalistycznymi rodzajami napędów, np. wielosilni-
kowych, typu master-slave (silnik zadający i silniki nadążne).
Po 2000 roku napędowe przetwornice częstotliwości zostały wzbogacone
Przetwornice częstotliwości
w automatyce przemysłowej –
budowa, dobór, zastosowanie
Rys.1. Dokładność stabilizowania prędkości wału silnika zależnie od
modelu silnika zastosowanego w przetwornicy częstotliwości [1]
Rys.2.Dokładnośćstabilizowaniaprędkościwałusilnikawzależnościodza-
stosowanejwprzetwornicyczęstotliwościmetodysterowaniasilnikiem[1]
rys. J. Szymański (3)
Rys. 3. Napięcia falownika uzyskiwane w modulacji nieciągłej
MSI60
°
[1]
dr inż. Jerzy Szymański
UniwersytetTechnologiczno-Humanistyczny w Radomiu,
Zakład Napędów Elektrycznych i Elektroniki Przemysłowej
ekspert


